Cranial neuro-navigation For Robotic Neurosurgery
Cranial neuro-navigation has become an integral part of contemporary neurosurgery, and is often practiced as an intensive manual process.Hence EHRC proposes a plan to develop a Neuro-navigation system that allow robotic system to accurately navigate in real time operative field.



The neurosurgeons decide the craniotomy path referring to a non real time radiographic images, often leading to an impromptu deviation in the surgical plan. Hence an alternate and effective method to autonomously guide a path with minimum medical risk is proposed for practising neurosurgical craniotomy procedures.
Image guided surgery (IGS) is reported to improve the outcome of the surgery, and offers real time anatomical information to the surgeon, which allows them to refine the plan towards surgery.Traditionally, in an IGS procedures, fiducial markers or stereotactic head frames are employed to aid in registration. However there is an associated pain and discomfort with the insertion of the pins associated with head frame that penetrate the scalp and secure the frame to the skull . The idea of utilizing natural anatomical landmarks or key points of the head is regarded as an efficient strategy in arriving towards a patient comfort solution.
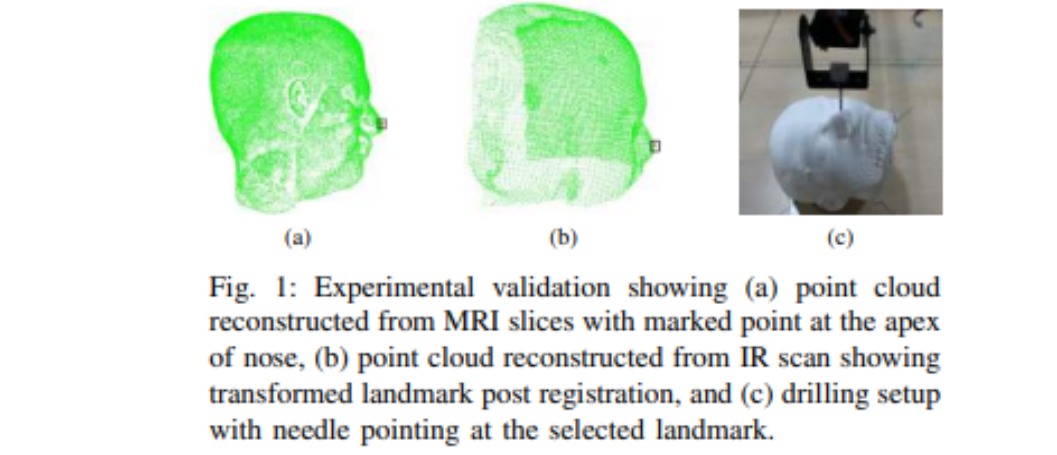
The registration of the image space with the surgical scene with reliable accuracy, is considered a valuable contribution in modern day neurosurgery. An efficient and robust local descriptors offer essential cues about geometry for analyzing and registering 3D objects, which is highly useful in the operative space of neurosurgery. The objective of the platform is to provide the robotic system a method to navigate in relation to patient anatomy. The proposed platform was integrated and demonstrated with the developed prototype level navigation system and accuracy of the overall system was reported.
Kindly refer to the attched PDF and Video for more details on the proposed design of Cranial neuro-navigation.
Team Members
Pon Deepika , Sriram Marisetty , Pavan K , Vinay C K , Vikas V
Principle Investigators