Drilling Robot -An Automated Drilling Device For Neurosurgical Applications
Mechanical drilling and perforation of bone is one of the most standard practices followed in neurosurgery.Considering this highly specialized task EHRC proposes a design towards achieving the first step in building an autonomous neurosurgical tool for craniotomy practices.



The current drilling systems are not robust enough to follow the drilling path, guided from a frameless software reconstructed model, that is derived from patient’s imaging in surgical space . Additionally, neurosurgeons have to deal with a specific problem to hold drilling tool perpendicular along all the drilling points in the path so that it has a minimum effect on the underlying dura . Hence an automated path planning module that guides the physical drilling system, with drilling tool setup oriented perpendicular to any specified point on the guided path is desired.
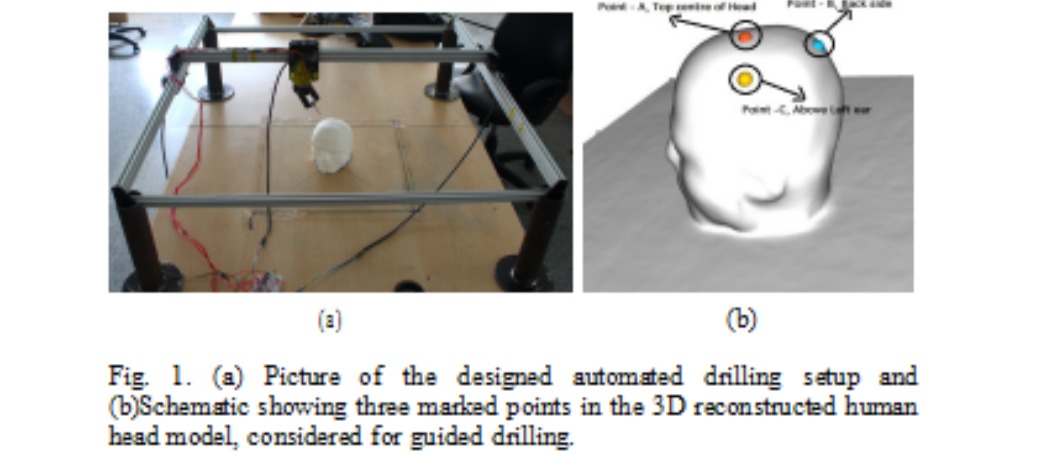
This proposed device of EHRC caters towards reaching to a specified target location of human head in the surgical space and orient the drilling tool system perpendicular to the target point on the surface to perform needle insertion or deep drilling. The developed autonomous drilling system is integrated to an imageguided system installed in surgical space. The autonomous drill positioning system is validated experimentally on a 3D printed human head, and its placement and orientation errors with accuracies are reported.
Kindly refer to the attched PDF and Video for more details on the proposed design of Drilling Robot.
Team Members
Sriram Marisetty , Pavan Kumar Pothula , Pon Deepika , Vinay C K , Vikas Vazhiyal
Principle Investigators