Upper limb exoskeleton-a portable anthropomimetic upper limb rehabilitation device
An upper limb anthropomimetic rehabilitation device has been designed for patients suffering from a neuromuscular disability. EHRC has developed a device that has been designed as a wearable device and attempts to supplement all known functions of the human hand and fingers.
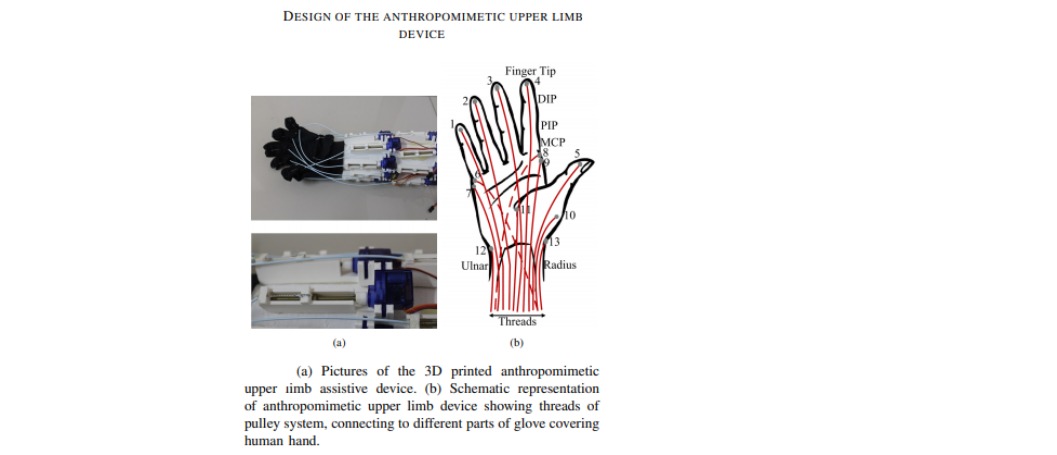




An upper limb anthropomimetic rehabilitation device has been designed for patients suffering from a neuromuscular disability. The developed device has been designed as a wearable device and attempts to supplement all known functions of the human hand and fingers. The actuation of individual joints of the hand and wrist has been implemented by using DC motors interfaced to a control system.
A pulley system was adopted to ensure a low device profile with the aim of maximising functionality in the affected hand. Both actuators and the electronic assembly are sited in the forearm assembly for this purpose. The device is designed to fulfill multiple roles. At its simplest instance, it is designed as a device for providing resistance training in patients suffering from reversible neuromuscular weakness.
The device also aims to provide support as an exoskeleton device in patients suffering from partial but permanent neuromuscular weakness. The measurement of finger and wrist bending in axial and radial directions were investigated by an array of potentiometers mounted around the wearable device covering different joints of the fingers and wrist, and were further analyzed to characterize the range of the device. The system is a composite device with diverse functions fulfilling all the requirements of an upperlimb orthotic device. The device is planned to be part of a comprehensive exoskeleton device for quadriparetic patients in the future.
Technological innovations have changed the management of disability. Prosthetic devices have changed the lives of amputees and allow them to lead near-normal lives. However, in the case of neuromuscular disability, progress in orthotic devices has been relatively tardy. This is due to the added complexity of these devices to account for form and physiology of the affected limb.
This Proposed design fulfills the nomenclature of being anthropomimetic in the anatomic and physiological sense. The next step in the development of the device is in testing in an actual clinical setting which will validate the experimental results which have been demonstrated. The design proposed can also be extended to incorporate actuation at shoulder and elbow joints also and are part of ongoing work.
Kindly refer to the attched PDF and Video for more details on the proposed design of Upper limb exoskeleton.
Team Members
Vinay Chandrasekhar , Vikas Vazhayil
Principle Investigators